
QAV Tiny90 Indoor FPV Quadrocopter – NAZE32
Highlights:
leicher Indoor FPV-Copter mit Kamera
inkl. NAZE32 – brush Flight Controller
inkl. Kamera 520TVL und Sender
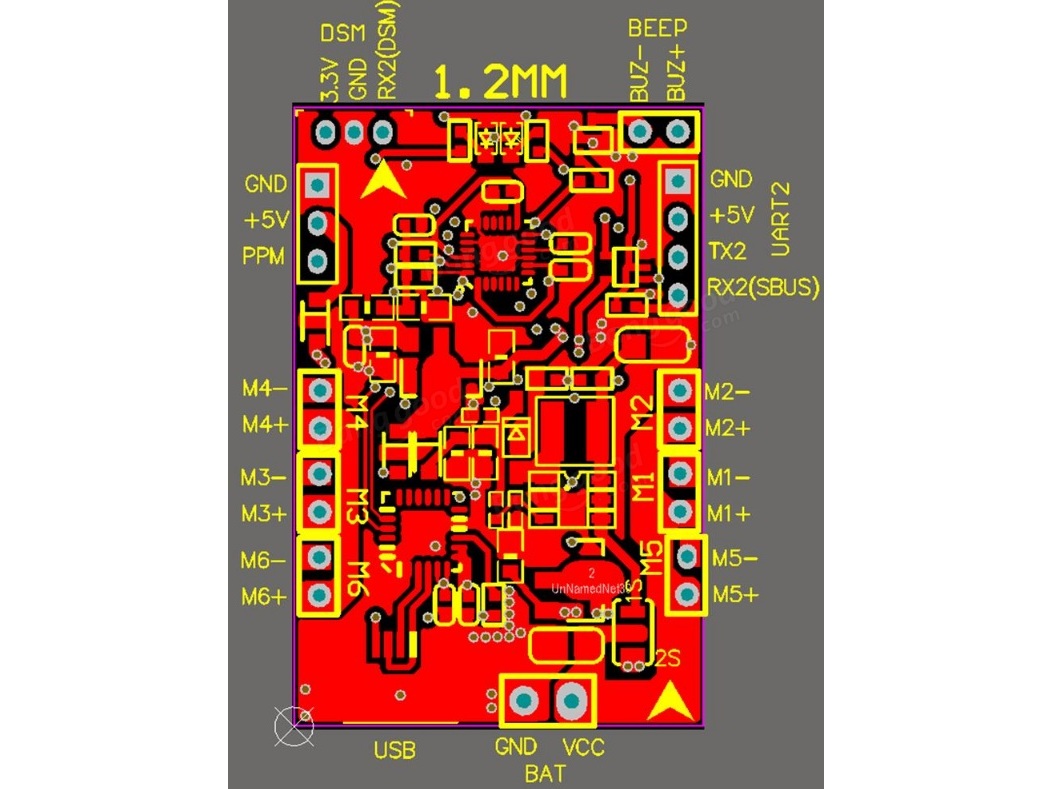
kompatible mit DSM (Spektrum 3.3V), S.BUS und PPM Empfängern (siehe Bild 3)
Technische Daten:
Masse: 118 x 118 x 70mm
Motor: Brush 8520
Kamera: 520TVL (3.3V – 5.5V)
Sender: 5.8G – 25mW
Kontroller: Naze32 – Brush
Flugzeit: ca. 5-6 Minuten
Akku: LiPo 1S/3.7V, 600mAh
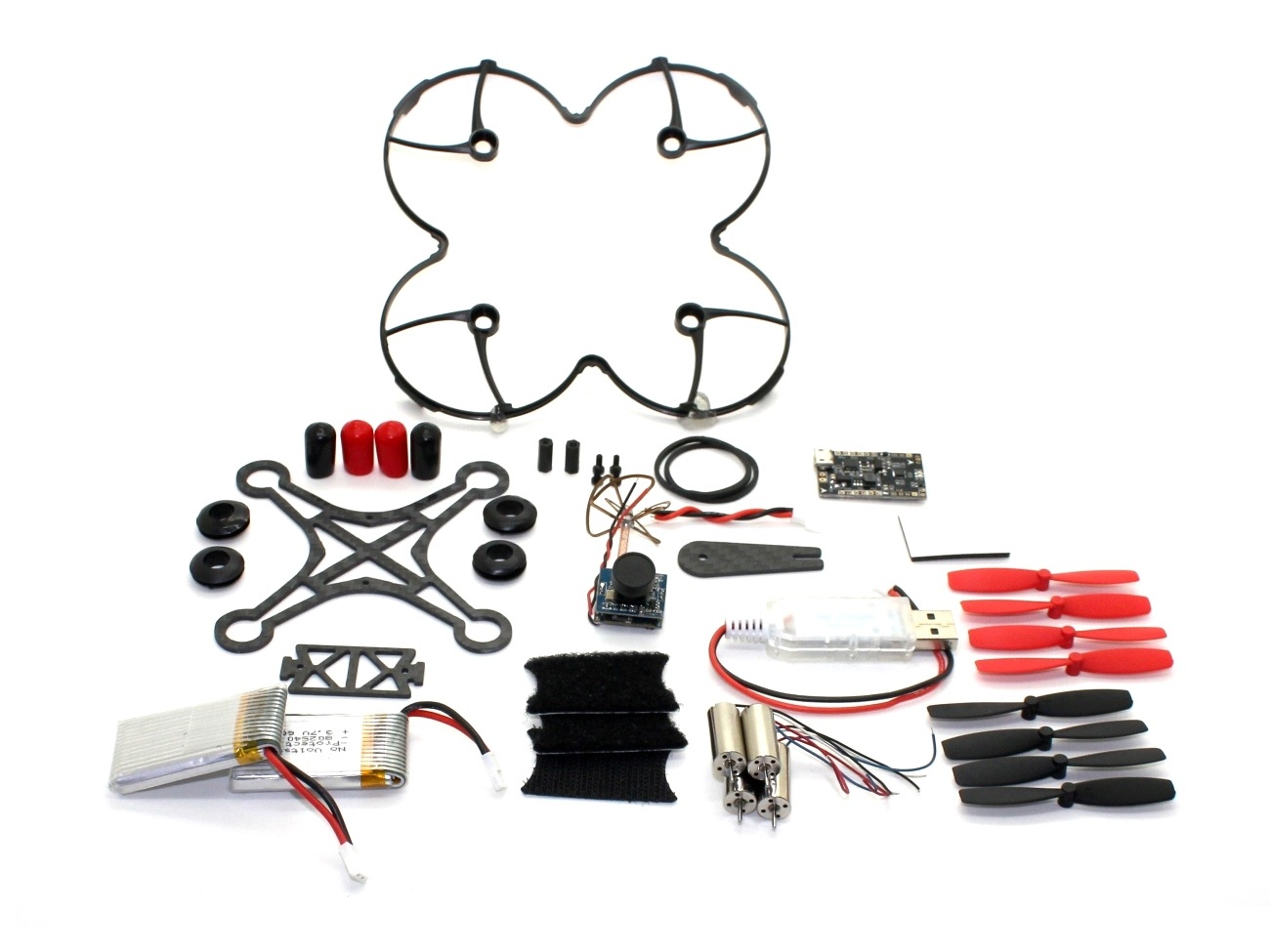
Lieferumfang:
Quadrocopter Tiny TQ90
* wie auf Bild-Nr. 2
* ohne Motoren
Naze32 – Flugkontroller
inkl. 8x Luftschrauben
inkl.2 x LiPo 1S/3.7V, 600mAh
div. Kleinteile und Zubehör
Was Sie noch benötigen:
4x Brush Motoren 8520 (wie in Hubsan 107C und 107D)
Ersatzteile:
Propeller:
Schutzrahmen: gleich wie Hubsan 107C Zum Artikel
Akku: Zum Artikel
Propeller: wie Hubsan 107C oder Ladybird Walkera
Motoren: Zum Artikel
Infos zum Naze32 brushed Board
Eigenschaften:
1. Das NAZE32_BRUSH basiert auf der Grundlage der NAZE32 Flugsteuerung. Es ist ein 32bit Brushed-Controller mit NAZE32 Firmware.
2. Kann mit 1S (3.7V) oder 2S (7.4V) betrieben werden
3. UART1 / 2 Ausgang 5V, UART3 Ausgang 3.3V
4. Mit NMOS-Transistoren, Betriebsstrom von bis zu 10A oder mehr.
5. Unterstützung für PPM, SBUS, DSM Empfänger-Eingangssignal.
6. Mit Eingangsspannungs-Erkennung und Buzzer-schnittstelle.
7.Unterstützt fast alle kleinen Bürstenmotoren, einschließlich 1020 coreless Motoren.
8.Für Quadro- und Hexacopter
zu Beachten:
Bevor Sie Akku anschliessen, achten Sie auf die Auswahl der Batteriespannung.
Voreingestellt ist 1S (4.2V); Wenn Sie 2S verwenden, müssen Sie zuerst die 1S Brücke auf der Platine trennen (unten rechts) und dann die beiden anderen Kontakte für 2S brücken.
NIE die drei Pads zur gleichen Zeit überbrücken.
Empfängerkonfiguration:
1. DSM-Empfänger wird direkt an die DSM-Schnittstelle 3.3V, GND, RX3 gelötet. In der CleanFlight-Software die Konfiguration UART3 auf Serial RX einstellen. Ändern Sie den Eingangssignal-Modus auf RX_SERIAL und stellen Sie dann die Empfänger-Auswahl auf Spektrum1024 oder 2048 ein.
2. SBUS-Empfänger wird direkt an die S.Bus-Schnittstelle gelötet. In der CleanFlight-Software die Konfiguration UART2 auf Serial RX einstellen. Ändern Sie den Eingangssignal-Modus auf RX_SERIAL und stellen Sie dann die Empfänger-Auswahl auf SBUS.
3. PPM Empfänger auf PPM Anschluss löten.Keine Notwendigkeit, das RX Serial einzustellen. Ändern Sie in der CleanFlight-Software nur die Empfängermodus RX_PPM.
Achtung!
Ab dem 1. Januar 2023 gelten in der Schweiz neue Regelung für Drohnen.
Die wichtigsten Infos haben wir in unserem Blogbeitrag für euch zusammengefasst.
Die aktuellsten Informationen können jederzeit der Webseite des Bundesamtes für Zivile Luftfahrt (BAZL) entnommen werden.










Bewertungen
Es gibt noch keine Bewertungen.